
Protokół Modbus TCP nadal jest jednym z najprostszych sposobów wymiany danych między automatyką a systemami nadrzędnymi. Sprawdza się tam, gdzie trzeba szybko odczytać pomiary, podać nastawy albo sterować prostymi sygnałami bez rozbudowanej warstwy pośredniej. W tym artykule rozkładam temat na części: jak działa komunikacja, gdzie ma sens, jak ją skonfigurować i jakie błędy najczęściej zatrzymują uruchomienie.
Najważniejsze fakty o komunikacji po TCP/IP
- To protokół aplikacyjny typu klient-serwer, który działa nad siecią Ethernet i używa zwykle portu 502.
- Ramka ma 7-bajtowy nagłówek MBAP, a przy połączeniu bezpośrednim identyfikator jednostki najczęściej przyjmuje wartość 0xFF.
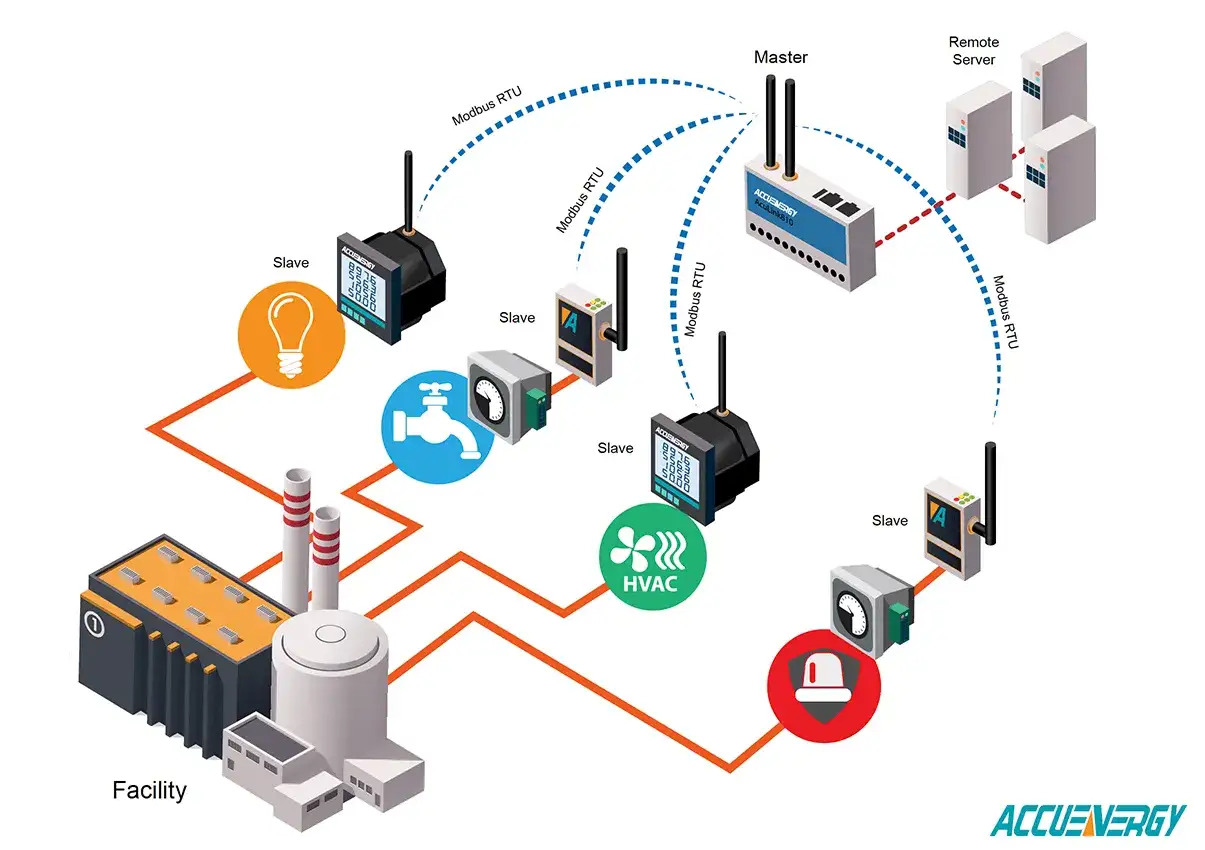
- Najczęściej służy do wymiany danych między PLC, HMI, SCADA, licznikami energii, napędami i bramkami.
- Największą zaletą jest prostota uruchomienia i diagnostyki, a największym ryzykiem brak wbudowanego szyfrowania i uwierzytelniania.
- Do pracy z danymi trzeba pilnować adresacji, kolejności bajtów oraz limitów wielkości zapytań.
Jak działa wymiana danych w praktyce
W takim układzie klient inicjuje rozmowę, a serwer odpowiada. Brzmi banalnie, ale właśnie ta prostota sprawia, że protokół tak dobrze sprawdza się w automatyce: nie ma tu rozbudowanego modelu obiektów, tylko konkretne żądanie i konkretna odpowiedź. W praktyce najpierw przesyłany jest nagłówek MBAP, a dopiero potem właściwe dane funkcji.
MBAP ma kilka pól, które warto znać, bo od nich zależy poprawna interpretacja komunikatu. Transaction Identifier wiąże odpowiedź z żądaniem, Protocol Identifier ma wartość 0, Length mówi, ile bajtów dalej następuje, a Unit Identifier pomaga w routingu, zwłaszcza przez bramki i mostki. Cały nagłówek ma 7 bajtów, więc nie jest ciężki, ale bez niego urządzenia nie potrafią się sprawnie dogadać.
| Pole | Rozmiar | Rola |
|---|---|---|
| Transaction Identifier | 2 bajty | Paruje żądanie z odpowiedzią |
| Protocol Identifier | 2 bajty | Wartość 0 dla Modbus |
| Length | 2 bajty | Określa liczbę kolejnych bajtów |
| Unit Identifier | 1 bajt | Przydaje się przy bramkach i urządzeniach pośrednich |
W samej warstwie aplikacyjnej najczęściej operuje się na kilku podstawowych funkcjach. Do odczytu cewek używa się 0x01, do odczytu holding registers 0x03, do odczytu input registers 0x04, do zapisu pojedynczej cewki 0x05, do zapisu pojedynczego rejestru 0x06, a do większych bloków zapisów 0x0F i 0x10. Dla mnie to właśnie ten zestaw pokrywa większość typowych wdrożeń w szafie sterowniczej, na maszynie albo w prostym SCADA.
Na bezpośrednim połączeniu Ethernetowym identyfikator jednostki zwykle ustawia się na 0xFF. Inaczej wygląda to za bramką do magistrali szeregowej, gdzie ten bajt zaczyna wskazywać właściwy węzeł po drugiej stronie. To prowadzi nas do pytania, gdzie ten protokół naprawdę daje przewagę, a gdzie lepiej nie oczekiwać od niego cudów.
Gdzie sprawdza się najlepiej, a gdzie nie jest pierwszym wyborem
Najczęściej widzę ten protokół w prostych, konkretnych zadaniach: odczyt temperatur, stanów wejść, liczników energii, pozycji napędów, nastaw regulatorów i podstawowych sygnałów procesowych. Dobrze działa tam, gdzie dane trzeba pobierać regularnie, ale nie ma potrzeby budowania rozbudowanej semantyki ani bardzo złożonego modelu informacji. Dla integratora to wygodne, bo jedna mapa rejestrów często wystarcza do spięcia całej linii albo podłączenia starszej maszyny do systemu nadrzędnego.
| Scenariusz | Dlaczego to działa | Na co uważać |
|---|---|---|
| PLC, HMI i SCADA w jednej sieci zakładowej | Prosta wymiana rejestrów i szybka diagnostyka przez standardowe narzędzia sieciowe | Trzeba pilnować adresacji i mapy danych, bo przy wielu urządzeniach łatwo o chaos |
| Liczniki energii i analizatory sieci | Urządzenia zwykle udostępniają czytelne rejestry pomiarowe | Warto sprawdzić skalowanie wartości i kolejność słów dla liczb 32-bitowych |
| Falowniki, softstarty i prostsze napędy | Wystarczają rejestry nastaw, statusów i alarmów | Nie nadaje się do bardzo szybkich, deterministycznych pętli sterowania ruchem |
| Modernizacja starej maszyny przez bramkę | Da się połączyć świat Ethernetu ze starszą magistralą szeregową | Tu szczególnie ważny staje się Unit Identifier i poprawne mapowanie adresów |
| Układy motion i synchronizacja o bardzo małej latencji | W prostych odczytach działa stabilnie | Jeśli wymagania czasowe są wysokie, zwykle wybieram inną technologię |
W praktyce lubię go za to, że nie udaje rozwiązania do wszystkiego. Jeśli potrzebujesz prostego, przewidywalnego kanału danych, to jest mocny kandydat. Jeśli jednak chcesz transportować bogaty model informacji, alarmy, historię zdarzeń i rozbudowane mechanizmy bezpieczeństwa, wtedy trzeba spojrzeć szerzej. I właśnie dlatego przed uruchomieniem zawsze porządkuję mapę rejestrów, zanim dotknę logiki sterowania.
Jak przygotować uruchomienie bez zgadywania
Najwięcej czasu oszczędza mi zawsze dobra dokumentacja po stronie urządzenia. Zanim zacznę testować komunikację, sprawdzam adres IP, maskę, rolę urządzenia, mapę rejestrów i to, czy producent opisuje dane jako 0-based czy 1-based. To drobiazgi, ale to właśnie one najczęściej rozstrzygają, czy połączenie działa od razu, czy zamienia się w godzinne szukanie błędu.
- Ustal, kto jest klientem, a kto serwerem. W takim układzie klient inicjuje odczyt albo zapis, a serwer tylko odpowiada.
- Sprawdź adres IP i otwórz port 502 tylko tam, gdzie ruch ma rzeczywiście przechodzić.
- Zweryfikuj Unit Identifier. Dla urządzenia podłączonego bezpośrednio do sieci Ethernet najczęściej startuję od 0xFF.
- Ustal, które dane są cewkami, które wejściami dyskretnymi, które rejestrami wejściowymi, a które holding registers.
- Przetestuj najpierw mały odczyt, zamiast od razu pobierać cały blok danych.
- Jeśli pobierasz liczby 32-bitowe lub zmiennoprzecinkowe, sprawdź kolejność bajtów i kolejność słów.
| Obszar danych | Rozmiar | Typowy dostęp | Do czego służy |
|---|---|---|---|
| Discrete Inputs | 1 bit | tylko odczyt | Stany wejść binarnych |
| Coils | 1 bit | odczyt i zapis | Wyjścia dyskretne, sterowanie prostymi sygnałami |
| Input Registers | 16 bitów | tylko odczyt | Pomiary, wartości procesowe, diagnostyka |
| Holding Registers | 16 bitów | odczyt i zapis | Nastawy, parametry, wartości zadane |
Tu przydaje się jeszcze jedna praktyczna zasada: nie zakładaj, że każdy rejestr jest dostępny tak samo, jak opisano to w dokumentacji ogólnej. Producenci często mapują dane po swojemu, a adres 40001 w tabeli bywa tylko umownym sposobem opisu, nie rzeczywistym offsetem. Dlatego zaczynam od małego odczytu, sprawdzam odpowiedź i dopiero potem rozbudowuję zakres. To prowadzi do kolejnego problemu, czyli błędów, które najszybciej psują uruchomienie.
Najczęstsze błędy, które blokują start
W praktyce większość problemów nie wynika z samego protokołu, tylko z drobnych niezgodności między dokumentacją a konfiguracją. To są błędy prozaiczne, ale bardzo kosztowne, bo potrafią zatrzymać cały rozruch. Gdy widzę, że komunikacja nie działa, najpierw sprawdzam właśnie te punkty, a dopiero później szukam winy w samym urządzeniu.
- Mylenie adresacji 0-based i 1-based. Dokumentacja może pokazywać numer „40001”, ale aplikacja oczekuje adresu 0.
- Zły Unit Identifier za bramką. Jeśli ruch idzie przez gateway, ten bajt przestaje być detalem i decyduje o routingu.
- Pomylenie kolejności bajtów i słów. Wartości 16-bitowe są kodowane big-endian, a przy 32-bitach producenci często stosują różne układy słów.
- Zbyt duże zapytanie. Dla odczytu holding registers praktyczny limit to 125 rejestrów w jednym żądaniu, więc większe bloki trzeba dzielić.
- Firewall albo VLAN bez reguł ruchu. Port 502 bywa zablokowany po prostu dlatego, że nikt nie dodał wyjątku.
- Założenie, że każde urządzenie obsługuje te same funkcje. Jedno potrafi tylko odczyt, inne zapis, a jeszcze inne ma własne ograniczenia producenta.
Jeśli mam wskazać jeden błąd, który wraca najczęściej, to jest nim właśnie adresacja. Drugi w kolejności to kolejność słów przy wartościach 32-bitowych, bo na ekranie wszystko wygląda poprawnie, tylko liczba jest kompletnie inna niż w rzeczywistości. Kiedy te dwa tematy są domknięte, porównanie z innymi rozwiązaniami robi się dużo prostsze.
Jak wypada na tle RTU i bardziej rozbudowanych standardów
Najuczciwiej patrzeć na ten protokół nie jak na „lepszy” albo „gorszy”, tylko jak na narzędzie do konkretnego typu pracy. W porównaniu z RTU dostajesz wygodniejszą integrację po Ethernet, prostszą diagnostykę i łatwiejsze spięcie z infrastrukturą zakładową. W porównaniu z bardziej rozbudowanymi standardami tracisz jednak bogatszy model danych, natywne mechanizmy bezpieczeństwa i część wygody przy większych integracjach.
| Cecha | Wariant po TCP/IP | Modbus RTU |
|---|---|---|
| Medium | Standardowy Ethernet i TCP/IP | RS-485 lub RS-232 |
| Uruchomienie | Wygodne, jeśli sieć już istnieje | Tanie przy prostych liniach, ale trzeba pilnować magistrali i okablowania |
| Diagnostyka | Łatwa dzięki narzędziom sieciowym | Da się diagnozować, ale zwykle wolniej i mniej wygodnie |
| Skalowalność | Dobra w sieci zakładowej i przy integracji wielu urządzeń | Dobra w prostych, lokalnych instalacjach |
| Bezpieczeństwo | Trzeba je zapewnić dodatkowo | Trzeba je zapewnić dodatkowo |
| Najlepsze użycie | PLC, HMI, SCADA, liczniki, napędy, bramki | Stare układy i proste magistrale terenowe |
Jeśli ktoś oczekuje nie tylko wymiany rejestrów, ale też opisowych nazw zmiennych, hierarchii danych, alarmów i lepszej polityki bezpieczeństwa, wtedy patrzę już w stronę OPC UA albo innych rozwiązań wyższej warstwy. Ten wybór nie odbiera sensu prostemu protokołowi, tylko ustawia go we właściwym miejscu: jako szybki i przewidywalny kanał danych, a nie uniwersalną platformę do wszystkiego. I właśnie dlatego bezpieczeństwa nie warto odkładać na później.
Bezpieczeństwo i stabilność w sieci zakładowej
W zamkniętej, dobrze zarządzanej sieci zakładowej ten mechanizm działa bardzo przyzwoicie, ale nie ma w sobie wbudowanej ochrony na poziomie, którego oczekiwałbym dziś w ruchu między segmentami sieci. Nie chodzi o to, żeby robić z niego projekt cyberbezpieczeństwa, tylko żeby nie wystawiać go bezmyślnie poza strefę, którą kontrolujesz. Ja nie wpuszczam takiego ruchu do otwartej sieci bez prostych zasad segmentacji i filtrowania.
- Oddziel ruch automatyki w osobnym VLAN-ie albo podsieci.
- Otwieraj port 502 tylko między konkretnymi hostami, które rzeczywiście mają się komunikować.
- Jeśli protokół ma przejść przez sieć mniej zaufaną, rozważ wariant zabezpieczony TLS, który działa na porcie 802, albo użyj tunelu VPN.
- Monitoruj timeouty, retransmisje i liczbę błędów odpowiedzi, bo to szybciej pokazuje problem niż sam alarm operatorski.
- Trzymaj kopię mapy rejestrów i wersjonuj ją razem z konfiguracją sterownika.
Stabilność to nie tylko bezpieczeństwo. Równie ważne jest przewidywalne obciążenie sieci i porządek w mapie danych. Gdy na jednej linii zaczynają pracować kolejne urządzenia, brak dyscypliny w adresacji i dokumentacji psuje układ szybciej niż sam wybór protokołu. To prowadzi do ostatniej rzeczy, którą zawsze zostawiam w projekcie.
Co zostawiam w dokumentacji, żeby instalacja dała się rozwijać
Jeśli projekt ma żyć dłużej niż pierwszy rozruch, stawiam na prostą zasadę: wszystko, co krytyczne dla komunikacji, musi być zapisane w jednym miejscu i opisane językiem zrozumiałym dla serwisanta. Najlepsze wdrożenia nie wygrywają tym, że są „sprytniejsze”, tylko tym, że po sześciu miesiącach da się je bez stresu odtworzyć i rozbudować.
- Jedna aktualna mapa rejestrów z opisem znaczenia, typu danych i skali.
- Jedna konwencja adresowania, żeby nikt nie mieszał offsetów z numerami handlowymi.
- Jeden krótki test uruchomieniowy z trzema lub czterema przykładowymi odczytami.
Takie podejście oszczędza więcej czasu niż dokładanie kolejnych warstw improwizacji. Jeśli komunikacja ma być praktycznym narzędziem, a nie źródłem wiecznych poprawek, dokumentacja musi być równie porządna jak sam układ sterowania. Wtedy ten protokół robi dokładnie to, do czego został stworzony: po prostu, szybko i przewidywalnie przenosi dane tam, gdzie są potrzebne.