
Najważniejsze informacje o regulatorze PID
- PID porównuje wartość zadaną z pomiarem i na tej podstawie koryguje sygnał sterujący.
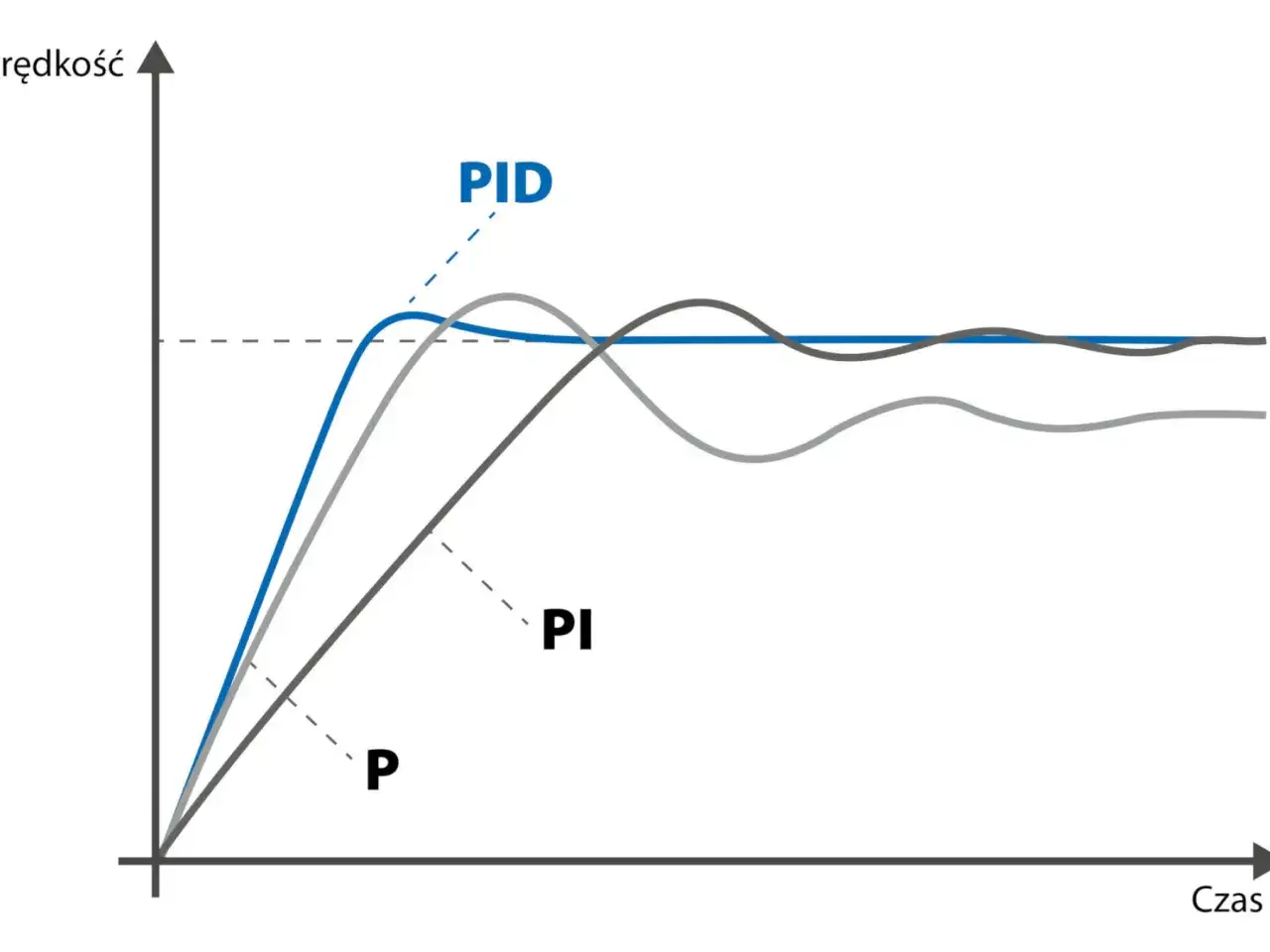
- Człon P reaguje natychmiast, I usuwa uchyb statyczny, a D tłumi zbyt gwałtowne zmiany.
- W wielu instalacjach wystarcza PI, zwłaszcza tam, gdzie proces jest wolny i stabilny.
- Dobrze zestrojony PID poprawia stabilność, ale źle ustawiony wprowadza oscylacje, przeregulowanie i nasycenie wyjścia.
- Strojenie zaczynam od P, potem dodaję I, a człon D stosuję ostrożnie, bo wzmacnia szum pomiarowy.
- Najlepiej działa tam, gdzie proces jest powtarzalny, a pomiar nie jest mocno zaszumiony.
Dlaczego regulator PID jest tak popularny
W automatyce nie chodzi o sterowanie „na oko”, tylko o to, by układ sam korygował odchyłki od celu. Regulator PID robi dokładnie to: bierze wartość zadaną, porównuje ją z wartością zmierzoną i na tej podstawie wylicza korektę dla obiektu. Ten obiekt może być bardzo różny: grzałka, silnik, zawór, pompa, napęd osi czy układ ciśnienia.
W praktyce patrzę na PID jak na kompromis między szybkością reakcji a spokojem układu. Jeśli sterowanie jest zbyt agresywne, pojawiają się oscylacje i przeregulowanie. Jeśli jest zbyt zachowawcze, układ dojście do celu trwa długo i zostaje wyraźny uchyb. PID jest popularny właśnie dlatego, że daje sensowną równowagę między tymi skrajnościami.
To nie jest magiczny algorytm, tylko bardzo użyteczny element pętli zamkniętej. Jego siła bierze się z prostoty, przewidywalności i tego, że da się go wdrożyć zarówno w prostym regulatorze temperatury, jak i w rozbudowanym PLC czy falowniku. Gdy już widać tę logikę, łatwiej przejść do samej pętli regulacji.
Jak działa pętla regulacji krok po kroku
Najprościej: czujnik mierzy stan procesu, sterownik porównuje go z celem, a regulator wysyła korektę do elementu wykonawczego. Cały mechanizm opiera się na sprzężeniu zwrotnym, czyli na tym, że wynik działania wraca do układu i wpływa na kolejną decyzję sterującą.
- Ustalasz wartość zadaną - na przykład 60°C, 1500 obr./min albo 5 bar.
- Czujnik mierzy rzeczywisty stan procesu - temperaturę, prędkość, poziom, ciśnienie lub pozycję.
- Regulator liczy błąd - różnicę między celem a pomiarem. W uproszczeniu: błąd = wartość zadana - wartość mierzona.
- Algorytm wyznacza korektę - bierze pod uwagę błąd bieżący, jego sumę w czasie i tempo zmian.
- Element wykonawczy reaguje - zawór się otwiera, grzałka dostaje więcej mocy, silnik przyspiesza.
- Nowy pomiar wraca do sterownika - i cykl zaczyna się od nowa.
To właśnie odróżnia sterowanie zamknięte od zwykłego „podania sygnału”. PID nie zakłada, że obiekt zachowa się idealnie. On cały czas sprawdza, czy efekt jest zgodny z celem i koryguje działanie na bieżąco. Gdy rozumie się ten mechanizm, człony P, I i D przestają być abstrakcją.
Jak działają człony P, I i D w praktyce
W uproszczeniu sygnał sterujący jest sumą trzech reakcji: na bieżący błąd, na nagromadzony błąd i na tempo zmian błędu. Każdy z tych członów robi coś innego, dlatego ich dobór ma tak duże znaczenie. To nie są trzy „dodatkowe funkcje”, tylko trzy różne sposoby myślenia o tym samym problemie.
| Człon | Co robi | Co daje | Ryzyko przy zbyt mocnym ustawieniu |
|---|---|---|---|
| P | Reaguje proporcjonalnie do bieżącego błędu | Szybka odpowiedź i prosta regulacja | Oscylacje i przeregulowanie, jeśli wzmocnienie jest za duże |
| I | Sumuje błąd w czasie | Usuwa uchyb statyczny | „Nakładanie się” korekt, wolne dochodzenie do stabilizacji i windup |
| D | Patrzy na tempo zmiany błędu | Tłumi przeregulowanie i poprawia hamowanie | Wzmacnia szum pomiarowy i potrafi rozhuśtać wyjście |
Człon P działa jak natychmiastowa reakcja: im większy błąd, tym mocniej sterownik naciska na proces. Człon I sprawia, że regulator „pamięta”, iż przez dłuższy czas był odchył od celu, więc nie kończy pracy z pozostawionym błędem. Człon D działa bardziej jak hamulec - wyłapuje, że sytuacja zmienia się zbyt szybko, i łagodzi ruch sterowania.
W praktyce często okazuje się, że PI wystarcza w układach temperatury, przepływu albo poziomu. Pełny PID przydaje się wtedy, gdy obiekt reaguje szybciej, trzeba ograniczyć przeregulowanie albo zależy nam na lepszym tłumieniu dynamicznych zmian. Z tej różnicy od razu wynika kolejne pytanie: gdzie ten regulator naprawdę daje najlepszy efekt.
Gdzie PID sprawdza się najlepiej, a gdzie lepiej wybrać PI
Nie każdy proces potrzebuje pełnego PID. W wielu instalacjach przemysłowych człon D jest po prostu zbyt wrażliwy na zakłócenia albo nie daje korzyści proporcjonalnej do ryzyka. Dlatego ja zwykle zaczynam od oceny samego procesu: czy jest szybki, wolny, zaszumiony, ma martwy czas, czy pracuje w jednym punkcie, czy w szerokim zakresie obciążenia.
| Przykład zastosowania | Najczęstszy wybór | Dlaczego właśnie tak |
|---|---|---|
| Temperatura pieca lub nagrzewnicy | PI | Proces jest zwykle wolny, a człon D często niewiele wnosi |
| Prędkość silnika | PID lub PI | Potrzebna jest dobra odpowiedź na zmianę obciążenia |
| Ciśnienie i przepływ | PI | W wielu układach wystarczy dobra korekta długotrwałego błędu |
| Pozycjonowanie osi, serwonapęd | PID | Liczy się szybka reakcja i ograniczenie przeregulowania |
| Poziom cieczy w zbiorniku | PI | Układ bywa wolny i ma małą korzyść z członu D |
| Pomiar mocno zaszumiony | PI lub inne podejście | Człon D może pogorszyć stabilność zamiast pomóc |
W tej tabeli najważniejsza jest jedna rzecz: PID nie jest domyślnie „lepszy” od PI. To częsty błąd początkujących. W procesie z dużym opóźnieniem i szumem pomiarowym pełny regulator może dać więcej problemów niż pożytku. Gdy wiesz już, jaki wariant ma sens, można przejść do strojenia.
Jak stroić regulator PID, żeby układ nie zaczął pływać
Strojenie to moment, w którym teoria zderza się z rzeczywistym obiektem. Na papierze wszystko wygląda elegancko, a w praktyce proces może mieć bezwładność, martwy czas, nieliniowość albo ograniczenia wyjścia. Dlatego przy strojeniu nie zmieniam kilku rzeczy naraz. Wolę prosty porządek, bo wtedy od razu widzę, co faktycznie poprawia działanie.
- Zacznij od samego P i wyłącz I oraz D.
- Zwiększaj P stopniowo, aż układ zacznie reagować dość szybko, ale jeszcze bez nadmiernych oscylacji.
- Dodaj I, żeby usunąć uchyb statyczny. Jeśli po jego dodaniu pojawiają się wahania, zmniejsz jego agresywność.
- Użyj D tylko wtedy, gdy naprawdę potrzebujesz wyciszyć przeregulowanie albo poprawić hamowanie ruchu.
- Przetestuj odpowiedź na zakłócenie, a nie tylko na skok wartości zadanej.
- Sprawdź ograniczenia wyjścia i włącz ochronę przed windupem, jeśli element wykonawczy ma swoje granice.
- Zweryfikuj czas próbkowania w układzie cyfrowym, bo zbyt wolny cykl spóźnia reakcję, a zbyt szybki potrafi bez sensu podbijać szum.
W nowoczesnych sterownikach często spotyka się autotuning, czyli automatyczne dobranie nastaw na podstawie odpowiedzi obiektu. To dobry punkt startowy, ale nie traktuję go jak końcowego wyroku. Jeśli układ pracuje w zmiennych warunkach, i tak sprawdzam zachowanie przy obciążeniu, w innym punkcie pracy i po zmianie zakłóceń. Dobrze zrobione strojenie jest praktyczne, nie „idealne”.
Najczęstsze błędy, które wyglądają jak zły PID
Wiele problemów przypisywanych regulatorowi wcale nie wynika z samego algorytmu. Często winny jest czujnik, zbyt mało wydajny zawór, martwy czas albo ograniczenie mechaniczne. Z mojego doświadczenia najłatwiej pomylić objaw z przyczyną, jeśli patrzy się tylko na ekran HMI, a nie na cały proces.
| Objaw | Co to zwykle oznacza | Na co spojrzeć najpierw |
|---|---|---|
| Oscylacje wokół wartości zadanej | P lub I są zbyt agresywne | Zmniejsz wzmocnienie P, potem sprawdź I |
| Duże przeregulowanie | Układ reaguje za mocno lub za późno hamuje | Dodaj ostrożnie D albo osłab P i I |
| Powolne dochodzenie do celu | P jest za słabe albo I działa zbyt delikatnie | Sprawdź, czy regulator nie jest ustawiony zbyt zachowawczo |
| Stały uchyb po ustabilizowaniu | Brakuje skutecznego działania całkującego | Zweryfikuj człon I i ograniczenia wyjścia |
| Wyjście „przykleja się” do 0% albo 100% | Nasycenie i windup | Włącz anti-windup i sprawdź zakres elementu wykonawczego |
| Regulator nerwowo reaguje na szum | Człon D jest za mocny albo pomiar jest słabej jakości | Dodaj filtrację, ogranicz D albo popraw tor pomiarowy |
Tu właśnie wychodzi praktyka automatyki: czasem problemem nie jest PID, tylko cały układ wokół niego. Jeśli czujnik mierzy z opóźnieniem, zawór jest zużyty albo napęd ma luzy, nawet dobrze dobrane nastawy nie dadzą cudów. To nie wada PID, tylko ograniczenie procesu, do którego trzeba podejść uczciwie.
Co warto zapamiętać, zanim wdrożysz PID w PLC lub falowniku
Jeżeli mam zostawić po sobie tylko kilka praktycznych zasad, to byłyby właśnie te. W regulacji najwięcej znaczy dobra obserwacja procesu, sensowny pomiar i spokojne strojenie. Sam algorytm jest ważny, ale nie zastępuje wiedzy o obiekcie.
- Najpierw mierz dobrze, dopiero potem reguluj - słaby sygnał wejściowy psuje nawet rozsądny regulator.
- Nie zakładaj, że pełny PID jest zawsze potrzebny - w wielu układach PI jest lepszym wyborem.
- Unikaj agresywnego członu D przy szumie - to częsty powód niestabilności.
- Uwzględnij martwy czas i nasycenie wyjścia - bez tego strojenie bywa pozornie poprawne, ale praktycznie słabe.
- Testuj układ przy zmianie obciążenia - dopiero wtedy widać, czy nastawy są naprawdę użyteczne.
Jeśli po pierwszym zestrojeniu układ nadal „pływa”, zwykle zaczynam od sprawdzenia czujnika, elementu wykonawczego i ograniczeń procesu, a dopiero potem wracam do nastaw. W automatyce to często daje lepszy efekt niż kolejne, nerwowe kręcenie parametrami.