
Regulacja PID wygląda na prosty układ trzech członów, ale to właśnie ten schemat decyduje, czy proces utrzyma temperaturę, ciśnienie albo pozycję bez niepotrzebnych oscylacji. W praktyce najwięcej daje umiejętność odczytania pętli: co jest wartością zadaną, skąd bierze się błąd, jak działa sprzężenie zwrotne i dlaczego sam regulator nie rozwiązuje wszystkich problemów. Pokażę to na przykładach z automatyki, w języku możliwie bliskim warsztatowi i PLC.
Najważniejsze rzeczy, które warto zapamiętać
- Układ regulacji PID działa w pętli zamkniętej: wartość zadana trafia do porównania z pomiarem, a wynik steruje obiektem.
- P reaguje natychmiast, I usuwa uchyb ustalony, a D tłumi szybkie zmiany i pomaga ograniczać przeregulowanie.
- Najwięcej problemów powodują nie sam diagram, lecz zbyt agresywne strojenie, opóźnienie procesu, szum pomiarowy i saturacja wyjścia.
- W wielu aplikacjach wystarcza PI, a pełny PID ma sens dopiero wtedy, gdy proces wymaga szybszej i bardziej przewidywalnej reakcji.
- Dobry schemat to taki, który pozwala bez zgadywania odróżnić sygnał zadany, procesowy, błędowy i sterujący.
Jak wygląda klasyczny układ regulacji PID
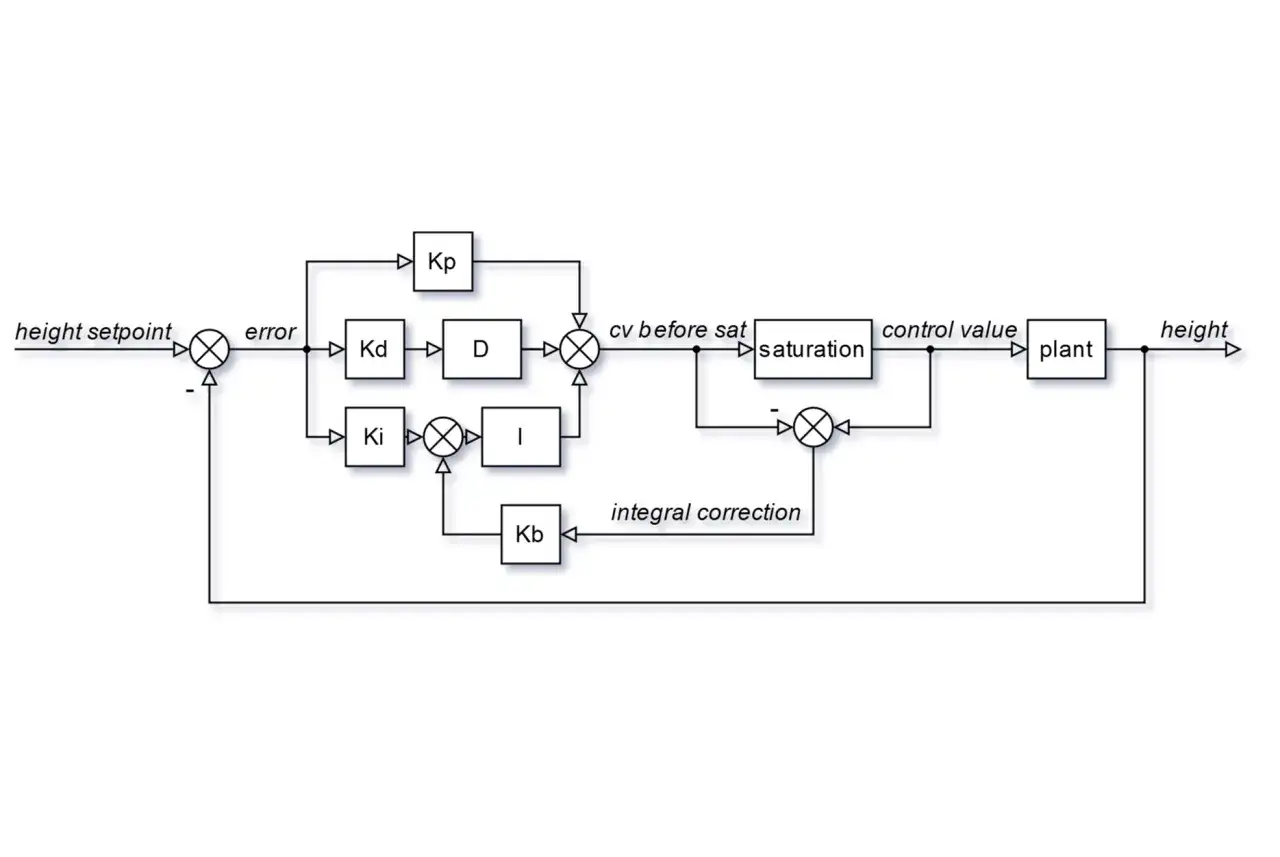
Ja zwykle czytam taki diagram od lewej do prawej. Najpierw pojawia się wartość zadana (setpoint, SP), czyli to, do czego układ ma dążyć, potem sygnał z czujnika, czyli wartość procesowa (PV). Oba sygnały trafiają do sumatora, gdzie powstaje błąd opisany najczęściej jako e(t) = SP - PV. Ten błąd nie jest celem samym w sobie, tylko informacją dla regulatora, jak mocno trzeba zareagować.
Za sumatorem stoi sam regulator, a dalej element wykonawczy i obiekt sterowania. Element wykonawczy może być zaworem, falownikiem, grzałką, siłownikiem albo innym urządzeniem, które realnie wpływa na proces. Obiekt sterowania to wszystko to, co chcemy kontrolować: piec, zbiornik, napęd, układ chłodzenia czy linia technologiczna. Na końcu jest czujnik, który mierzy efekt działania i zamyka pętlę przez sprzężenie zwrotne.| Element diagramu | Rola | Na co patrzę w praktyce |
|---|---|---|
| Wartość zadana | Określa cel regulacji | Czy jest stabilna, czy zmienia się skokowo |
| Sumator | Wylicza błąd między SP i PV | Czy znak błędu jest ustawiony poprawnie |
| Regulator | Oblicza sygnał sterujący | Czy działa w trybie direct czy reverse |
| Element wykonawczy | Wpływa na proces fizyczny | Czy nie dochodzi do ograniczeń 0-100% |
| Obiekt | Reaguje na sterowanie | Jak szybko odpowiada i czy ma opóźnienie |
| Czujnik | Mierzy efekt działania układu | Czy pomiar jest stabilny i wiarygodny |
Jeżeli ten obraz jest czytelny, cały układ zaczyna nabierać sensu. Gdy nie jest, najlepiej rozłożyć go na sygnały i sprawdzić, gdzie dokładnie ginie informacja albo pojawia się opóźnienie.
Jak czytać poszczególne bloki bez zgadywania
W praktyce największy błąd początkujących polega na patrzeniu na regulator jak na „magiczny moduł”, zamiast jak na łańcuch zależności. Każdy blok mówi coś innego: jedne elementy mierzą, inne liczą, jeszcze inne wykonują ruch. Jeśli pomylisz ich rolę, łatwo dojdziesz do wniosku, że „PID nie działa”, chociaż problem leży w polaryzacji, czujniku albo ograniczeniu wyjścia.
| Symbol lub blok | Co oznacza | Typowy błąd |
|---|---|---|
| SP | Wartość zadana | Traktowanie jej jak sygnału pomiarowego |
| PV | Wartość procesowa z czujnika | Brak skalowania do tych samych jednostek co SP |
| e(t) | Błąd regulacji | Odwrócony znak błędu i „uciekający” proces |
| u(t) | Sygnał sterujący | Brak uwzględnienia ograniczeń wyjścia |
| Feedback | Sprzężenie zwrotne | Uznanie go za zbędne „opakowanie” schematu |
| Saturation | Ograniczenie wyjścia | Ignorowanie go, mimo że proces jest fizycznie ograniczony |
Najważniejsza rzecz, którą sprawdzam zawsze na początku, to kierunek działania. Jeśli proces ma grzać, a po wzroście temperatury sterownik jeszcze bardziej podaje moc, to układ działa w złym kierunku albo został źle skonfigurowany. Druga rzecz to jednostki: 22°C i 22% to nie jest to samo, a zła skala potrafi całkiem rozjechać odczyt diagramu.
Warto też odróżnić sprzężenie zwrotne ujemne, które stabilizuje układ, od przypadkowego dodatniego, które potrafi wzmacniać odchyłkę zamiast ją redukować. To właśnie tutaj schemat blokowy przestaje być ozdobą, a staje się narzędziem diagnostycznym.
Co naprawdę robią człony P, I i D
Na poziomie intuicji każdy człon odpowiada za inny typ zachowania układu. P przyspiesza reakcję, I pilnuje, żeby system nie zostawił stałego błędu, a D reaguje na to, jak szybko błąd się zmienia. To brzmi prosto, ale w praktyce każdy z tych członów ma swoje koszty uboczne.
Człon P przyspiesza reakcję
Człon proporcjonalny zwiększa wyjście wraz ze wzrostem błędu. Jeśli odchyłka jest duża, regulator reaguje mocniej; jeśli mała, słabiej. To daje układowi „kręgosłup” i większość pętli bez członu P byłaby po prostu ślamazarna. Problem zaczyna się wtedy, gdy wzmocnienie jest zbyt wysokie: proces zaczyna oscylować, a każde małe odchylenie wywołuje zbyt agresywną odpowiedź.
Człon I usuwa uchyb ustalony
Człon całkujący zbiera błąd w czasie, więc jeśli proces przez dłuższą chwilę nie dochodzi do wartości zadanej, I „dokłada” sterowanie aż do skutku. Dzięki temu znika uchyb ustalony, czyli różnica, która po ustabilizowaniu układu nadal zostaje między SP a PV. To właśnie ten człon sprawia, że temperatura pieca czy poziom w zbiorniku nie zatrzymują się „prawie dobrze”, tylko naprawdę dochodzą do celu.
Ja traktuję I ostrożnie, bo zbyt mocne całkowanie szybko kończy się przesterowaniem i tzw. wind-upem, czyli „nakręceniem” regulatora na wyjściu, które już dawno wpadło w ograniczenie. Jeśli zawór albo falownik siedzi długo na 0% lub 100%, bez anti-windup układ odzyskuje równowagę zdecydowanie za późno.
Przeczytaj również: Regulator PID - Jak działa, jak stroić i unikać błędów?
Człon D tłumi gwałtowne zmiany
Człon różniczkujący patrzy na tempo zmian błędu, czyli z grubsza na to, dokąd proces zmierza. W praktyce pomaga ograniczać przeregulowanie i poprawia zachowanie przy szybkich zmianach. Problem polega na tym, że D bardzo lubi wzmacniać szum pomiarowy, więc w realnych układach niemal zawsze wymaga filtra.
Dlatego człon D ma sens tam, gdzie pomiar jest względnie czysty, a proces reaguje szybko. W układach wolnych i zaszumionych często więcej szkodzi niż pomaga, więc nie traktuję go jako obowiązkowego elementu „dobrego” regulatora.
Jeśli patrzę na PID praktycznie, to właśnie z tego powodu najpierw oceniam proces, a dopiero później dobieram strukturę regulatora.
Kiedy lepszy będzie PI, PID albo proste on-off
Nie każdy proces potrzebuje pełnego PID. Czasem PI jest rozsądniejszy, a czasem wystarczy zwykłe sterowanie dwustanowe. Dobór zależy od tego, jak szybko układ reaguje, jak bardzo przeszkadza szum i czy priorytetem jest precyzja, czy prostota.
| Typ sterowania | Zalety | Ograniczenia | Gdzie sprawdza się najlepiej |
|---|---|---|---|
| On-off | Proste, tanie, mało ustawień | Naturalne oscylacje wokół progu | Termostaty, proste grzanie, wentylacja z histerezą |
| PI | Usuwa uchyb ustalony, mniej wrażliwe na szum niż PID | Bez członu D reakcja bywa spokojniejsza | Temperatura, przepływ, poziom, wiele pętli procesowych |
| PID | Lepsza dynamika, większa kontrola nad przeregulowaniem | Wymaga lepszego strojenia i czystszego pomiaru | Napędy, pozycjonowanie, szybsze pętle ciśnienia i ruchu |
Moje praktyczne podejście jest dość proste: jeśli proces jest wolny, dość stabilny i nie walczy z szumem, zaczynam od PI. Jeśli widzę potrzebę lepszego tłumienia i szybszej reakcji, dopiero wtedy dorzucam D. W odwrotną stronę też to działa: gdy układ „pływa” przez zakłócenia i pomiar jest brudny, pełny PID potrafi pogorszyć sytuację zamiast ją poprawić.
To ważne, bo zbyt często pełny regulator wybiera się z rozpędu, a nie z potrzeby.
Jak zestroić regulator w praktyce
Jeśli miałbym zacząć od zera, robiłbym to w stałej kolejności. Dzięki temu szybciej widać, który człon naprawdę pomaga, a który tylko maskuje problem. Strojenie „na czuja” też bywa skuteczne, ale tylko wtedy, gdy ktoś ma już doświadczenie z konkretnym obiektem.
- Najpierw wyłączam I i D, zostawiając sam człon P.
- Podnoszę wzmocnienie P do momentu, w którym układ reaguje szybko, ale jeszcze nie wpada w trwałe oscylacje.
- Dopiero potem dodaję I, żeby zlikwidować uchyb ustalony.
- Jeśli proces jest szybki i pomiar stabilny, dołączam D jako element tłumiący przeregulowanie.
- Na końcu sprawdzam zachowanie przy ograniczeniach wyjścia i przejściu z trybu ręcznego do automatycznego.
W praktyce ustawiam też rozsądny czas próbkowania. Dla wolnych procesów cieplnych punkt startowy bywa rzędu 1-5 s, a dla szybszych pętli ciśnienia czy przepływu często schodzi się do 100 ms-1 s. To nie są żelazne reguły, tylko sensowne punkty startowe, które trzeba dopasować do bezwładności obiektu i jakości pomiaru.
Jeśli wyjście regulatora dobija do limitu na dłużej niż kilka cykli próbkowania, włączam anti-windup albo ograniczam integralne „nakręcanie”. To drobiazg, który często ratuje cały układ przed długim wychodzeniem z przesterowania.
Najczęstsze błędy, które psują nawet dobry schemat
Największe problemy rzadko wynikają z samej teorii. Zwykle coś psuje implementacja, okablowanie, skalowanie albo błędne założenie o tym, jak zachowuje się obiekt. Gdy widzę układ, który reaguje nerwowo albo nie dochodzi do wartości zadanej, najpierw szukam jednego z poniższych punktów.
- Odwrócony znak błędu - regulator zamiast gasić odchyłkę, jeszcze ją podbija.
- Złe skalowanie sygnałów - SP, PV i wyjście nie są w tej samej logice jednostek.
- Zbyt mocne I - układ „dobija” do celu za długo i potem oscyluje.
- D na zaszumionym pomiarze - sygnał sterujący zaczyna drżeć bez realnej potrzeby.
- Brak uwzględnienia saturacji - obiekt jest fizycznie ograniczony, a regulator zachowuje się, jakby nie był.
- Zły punkt pomiaru - czujnik mierzy coś obok właściwej wielkości i pętla goni własny cień.
Ja szczególnie pilnuję dwóch rzeczy: polaryzacji regulatora i miejsca pomiaru. To właśnie one najczęściej decydują, czy cały układ działa stabilnie, czy tylko wygląda dobrze na schemacie.
Co warto sprawdzić, zanim uznasz układ za gotowy
Jeżeli miałbym zostawić po tym temacie tylko jedną krótką checklistę, wyglądałaby tak:
- Sprawdź, czy SP i PV mają zgodne jednostki oraz sensowny zakres.
- Upewnij się, że kierunek działania jest poprawny dla grzania, chłodzenia, ruchu lub przepływu.
- Zweryfikuj, czy element wykonawczy nie wchodzi zbyt często w pełne otwarcie albo pełne zamknięcie.
- Sprawdź, czy pomiar nie jest zbyt zaszumiony dla członu D.
- Przetestuj przejście z trybu ręcznego do automatycznego bez skoku na wyjściu.
- Obserwuj odpowiedź na skok wartości zadanej i na zakłócenie, bo oba testy mówią coś innego o układzie.
W dobrze zrozumianym układzie PID sam diagram nie jest dekoracją, tylko mapą zachowania procesu. Jeśli potrafisz odczytać z niego błąd, sprzężenie, ograniczenia i rolę każdego członu, łatwiej dobrać regulator, szybciej wykryć błąd i uniknąć strojenia „w ciemno”.